前言
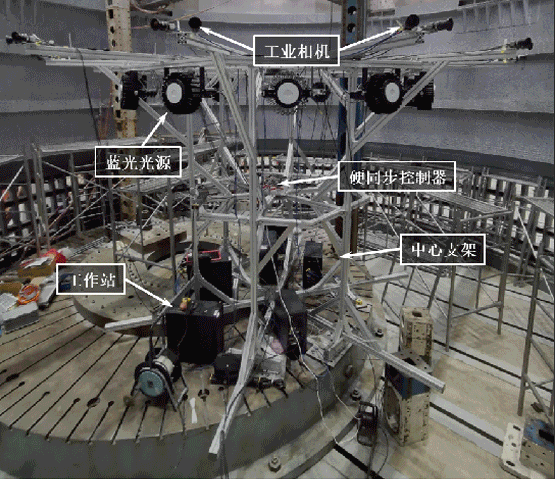
针对超大直径运载火箭舱段全周变形实时测量需求, 东视传感技术团队研制了由24台实时三维位移应变测量仪(可调节版)组成的大型结构全周三维位移应变测量仪, 成功实现了火箭舱段内表面柱坐标系下360°全周变形测量和局部笛卡尔坐标系下区域变形实时测量。
技术分析
对于运载火箭舱段全周变形实时测量,有以下三个问题和挑战需要解决。
第一个问题是大尺度散斑场制作问题。为了实现舱段结构表面高精度变形测量,需要在近100平方米结构面上制作高质量散斑场。第二个问题是大尺度全周测量问题。需要实现舱段表面360°全周变形测量,单套三维系统是无法满足需求的。同时,为了保证测量精度,单套三维系统的视场也不宜过大。第三个问题是舱段变形实时测量问题, 需要在加载过程中实时测量加载点附件舱段变形。
为了解决大尺度散斑场制作问题,东视传感技术团队提出使用数字散斑转印方法,将7.2mm直径数字散斑转印到火箭舱段表面。为了解决舱段表面360°全周变形高精度测量问题,东视传感技术团队研制了由24台实时三维位移应变测量仪组成的相机网络变形测量系统, 将24台相机的测量结果坐标系统一并在柱坐标系下显示360°全周变形。为了解决舱段局部变形实时测量问题, 东视传感技术团队研制了基于CPU并行计算策略的实时三维变形测量软件。单套双目测量系统与一台电脑连接, 实时测量并显示笛卡尔坐标系下的区域变形。
相机网络测量系统由12套双目系统组成, 单套双目系统的视场大小为 3.6×3.6m, 相邻两套双目系统之间设置一定的重叠区域以保证测量结果的连续性。采用单目摄影测量和双目立体视觉分别重构编码点三维坐标, 通过同名编码点实现局部坐标系和全局坐标系之间的坐标变换, 最终实现了12套双目系统的坐标统一。单套双目系统可与一台电脑连接, 采用基于种子点扩散的并行算法和变形连续性传递的初值估计方法, 成功实现70000点/s的实时三维位移测量和表面应变测量。
目前,摄像测量技术因其大范围、全场、非接触等特殊优势被广泛应用于科研和工程领域的结构变形测量。摄像测量技术不仅可以测量结构表面应变场,还可以测量结构表面三维位移场,获得丰富的变形数据。
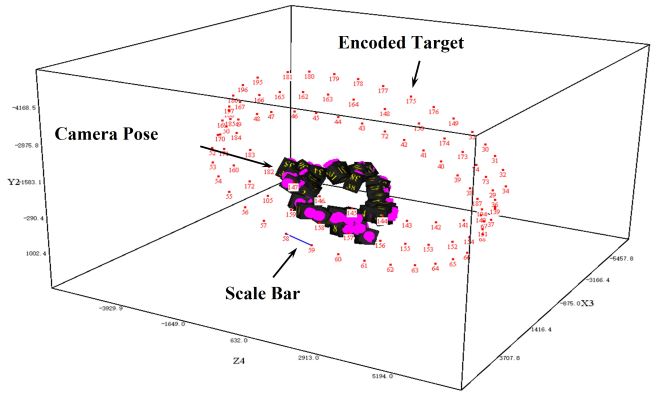
多设备融合建立全局坐标系
核心测试数据
基于柱坐标下的360°全周变形测量结果,成功实现扩散角的高精度计算。三个方向位移静态噪声标准差小于0.01mm,应变静态噪声标准差小于50 微应变。为了证明测量系统的准确度, 进一步开展了平移台精度验证实验, 当运动的幅值为8mm时(实际舱段加载最大的位移幅值),面内准确度为 0.0184mm(0.23%),离面准确度为 0.0384mm(0.48%),可以满足测量需求。

位移和应变测量静态噪声
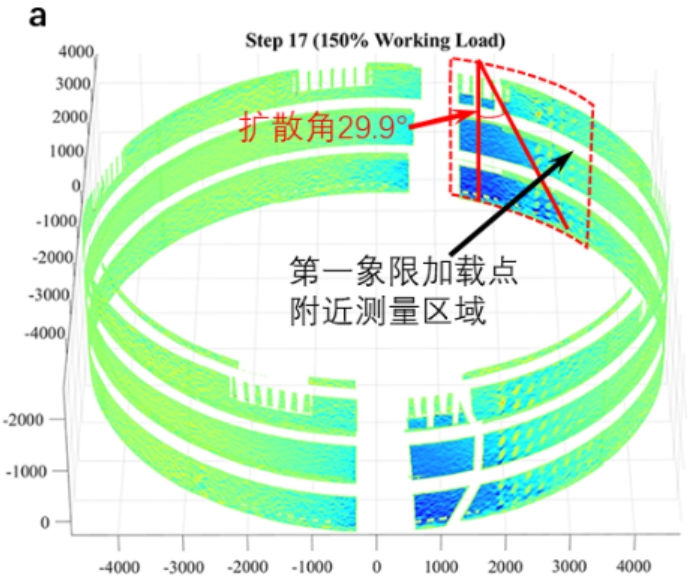
如图所示, 为第17级加载状态下的柱坐标360°全周变形, 包括轴向位移场和应变场, 沿半径方向的屈曲变形和转角应变。 360°全周变形可以全方位的展现火箭舱段在荷载作用下的变形, 根据变形结果可以直接分析其变形状态和力学性能。当载荷加至最大一级(150%使用载荷)时, 第一象限加载点附近的测量区域在全局坐标系下的变形云图如图所示. 在该区内以EZ≤-1800微应变作为扩散区, 求解最大载荷条件下扩散角为29.9°,与数值仿真的结果30.0°非常接近。
第17级加载下的柱坐标360°全周变形
加载位置的扩散角
工程应用价值
东视传感技术团队研制的具有自主知识产权的全周三维变形测量系统, 成功实现了火箭舱段内表面局部笛卡尔坐标系下区域变形70000点/s的实时测量和柱坐标系下360°全周变形测量。可用于飞机、火箭等飞行器的结构测试和性能评估。