产品介绍
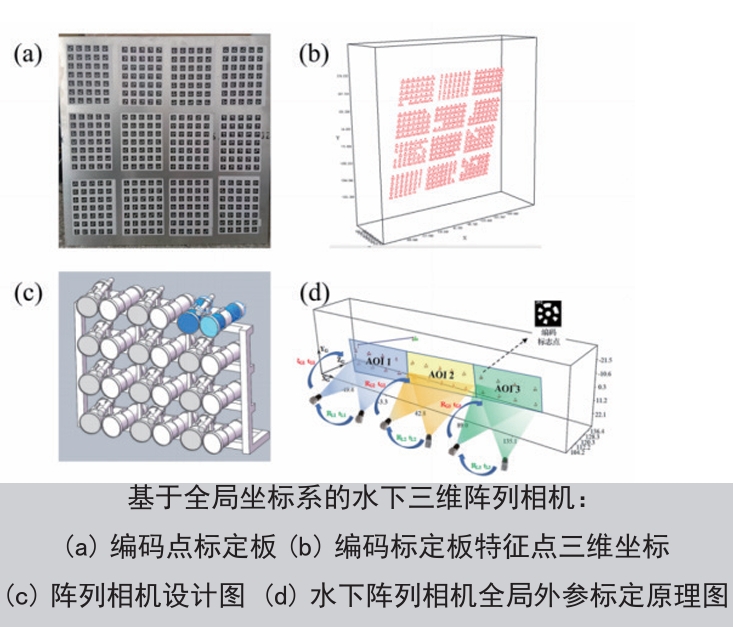
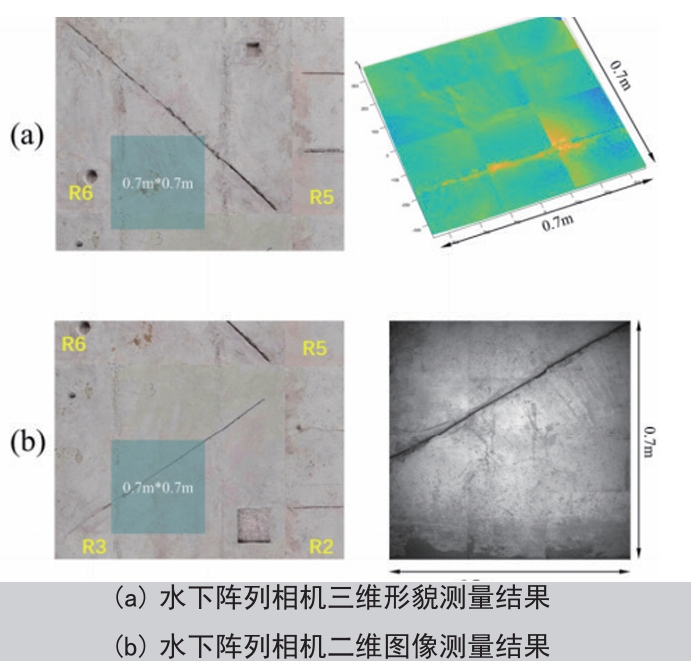
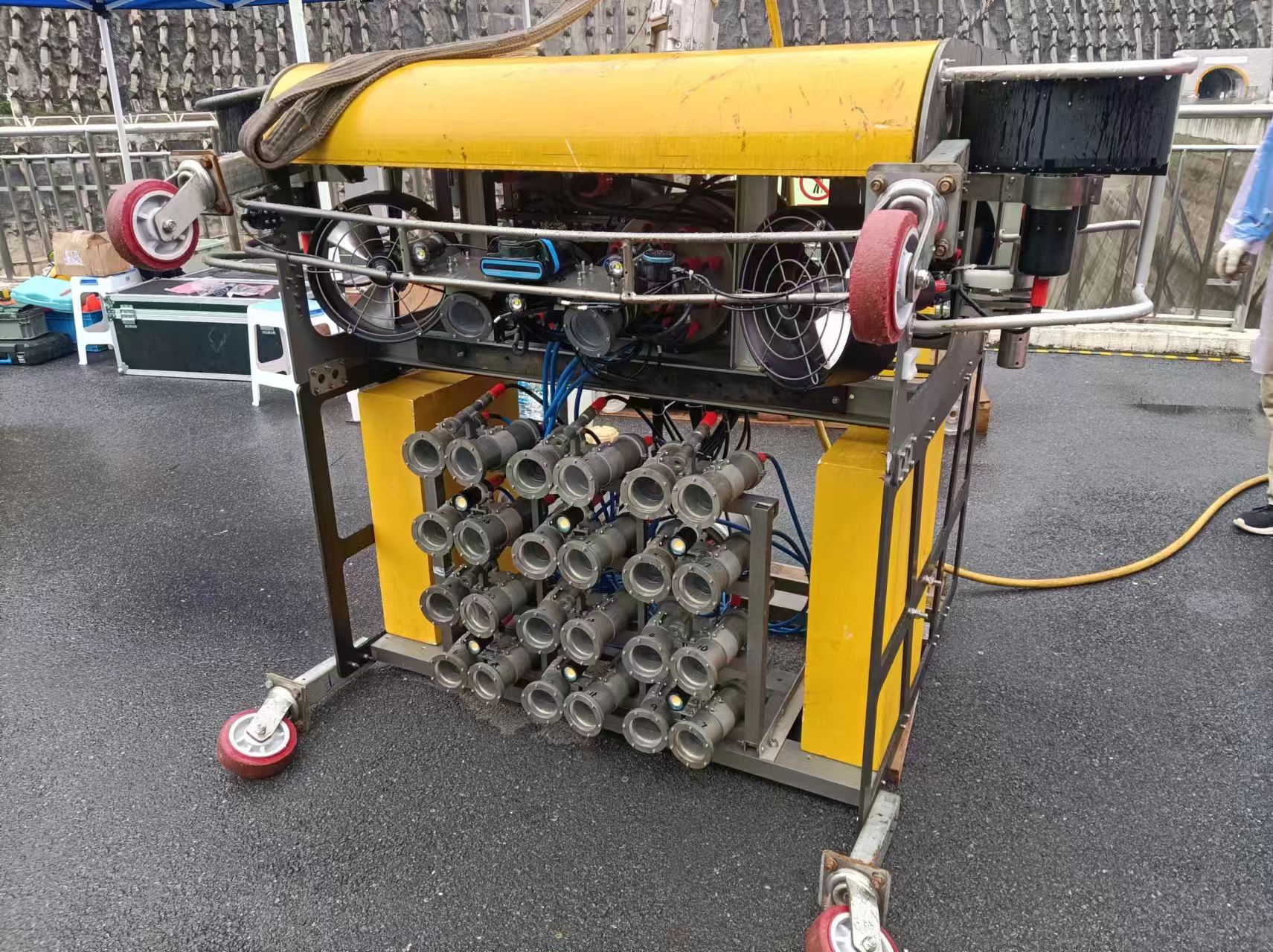
东视传感技术团队研制的三维相机阵列水下缺陷检测方法由多个双目相机子系统组成,为保证测量结果的连续性,提出了一种统一子系统外部参数的方法。采用折射相机模型和标定方法消除了重建过程中的折射误差。 在水下环境中,近红外随机散斑有利于图像的密集匹配与数字图像的相关。实验验证了该方法的准确性。平均重建误差小于1.1 mm。两个子系统在深度方向上的最大相对误差为2.61 mm,整体测量视场为700 mm × 700 mm。将三维相机阵列安装在水下机器人上,成功应用于水下结构缺陷检测,实现了深水环境下短工作距离、大视场、高精度的三维重建。
技术难点
经典的声学探测技术不适合水下结构局部精细化检测,视觉测量方法具有获取的图像自然直观,信息量大,分辨率高等优点;河湖,水库,海洋等多为浑浊水体,获取的图像质量低;单个相机只能获取二维信息等缺点,制约水下视觉检测的发展。
工程应用价值
三维相机阵列水下缺陷检测方法可应用于军事、交通、能源等多个领域,实现水下结构高精度、非接触、实时全周测量。在军事领域,可用于水下爆炸作用下结构变形光学三维感知技术研究;在交通领域,可用于桥梁水下结构裂缝测量;大型船体外壳快速普查。